Once the system checks are complete, all blocks will show green. Operator can the click on the “TAKE OFF” button to set the desired altitude and then launch by sliding the confirm button.
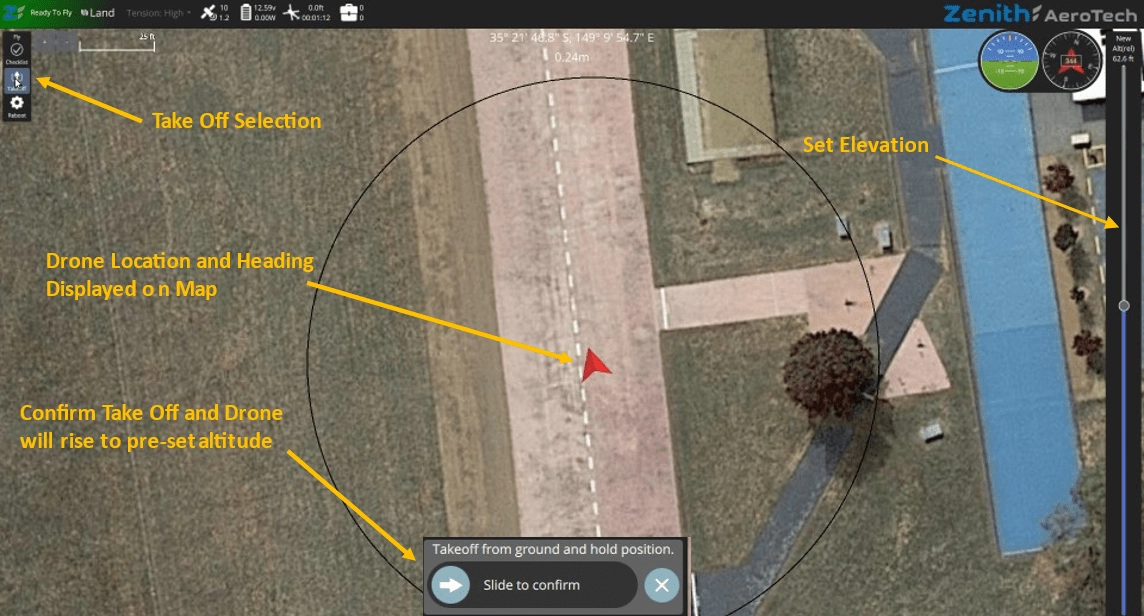
Once confirmed, the DRONE will take off and climb to the preset altitude and hold that altitude and heading
To change the flight altitude operator clicks the altitude button, sets the new altitude and confirms the slider.
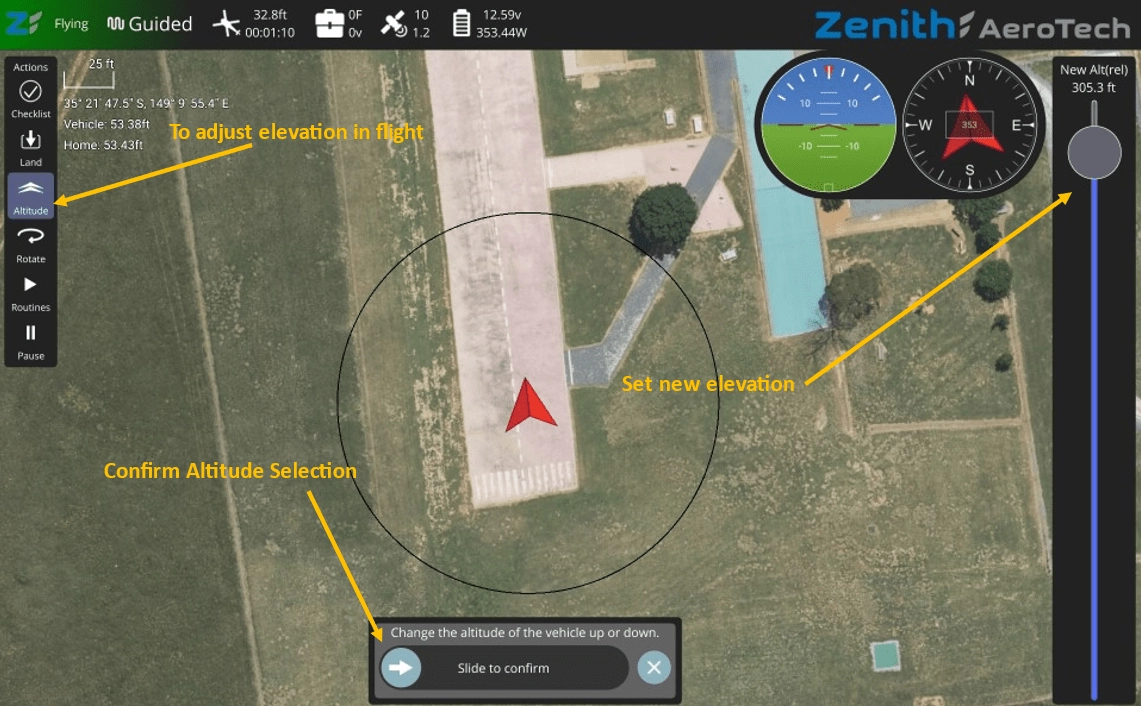
Once confirmed, the DRONE will climb or descent to the new altitude and hold that altitude and heading.
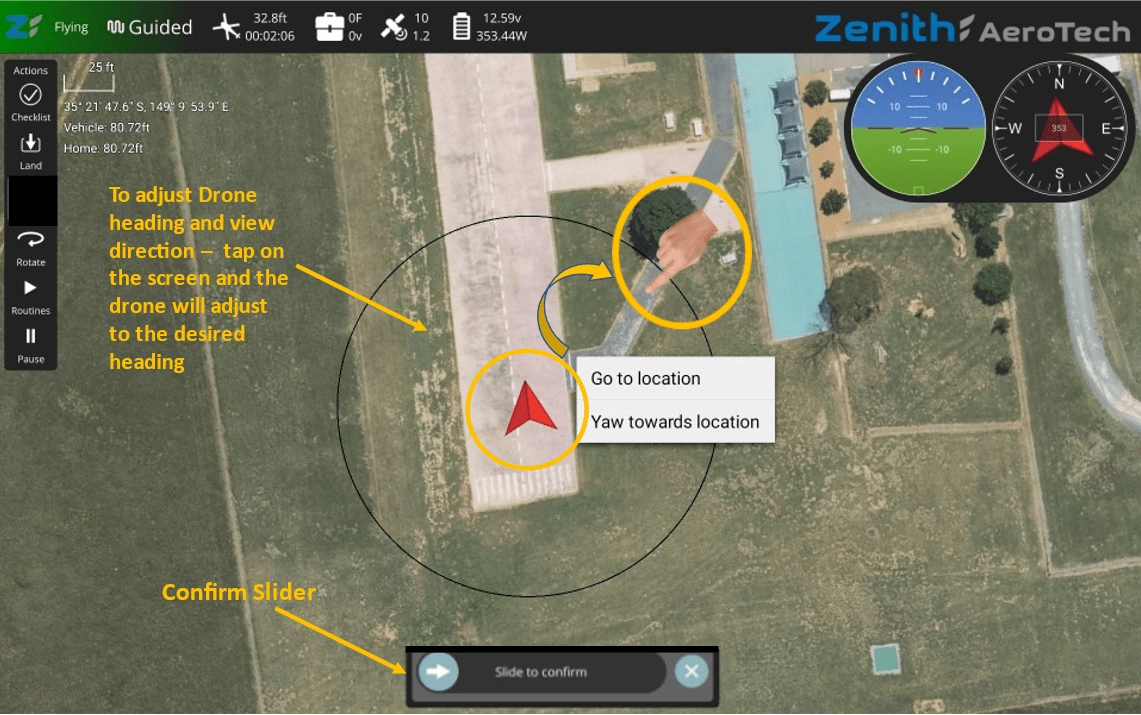
To adjust the drone’s physical location or adjust the flight heading, point on the screen to the desired location or heading and select “Go to Location or Yaw (rotate),” then confirm your selection. The drone will reorient to that location or heading. The drone can only be moved within the extent of the geofence (black circle displayed onscreen – radius of 20 meters approximately).
Landing is an automated function for the most part. If you wish to land, select the LAND function. You will then be asked if you want to LAND in place or RETURN to LAUNCH. Make a selection and then confirm via the slider.
Before landing make sure the area has remained clear of objects, people, or vehicles. Once the drone senses it is on the ground the propellers will shut down and the drone will be ready to fly again.

LAND selection will cause the drone to execute a landing routine at the current flight position.
RETURN TO LAUNCH will cause the drone to reorient and land at its original location. The drone will land and shut down its propellers once on the ground.
Once the drone has landed and shut down its ready to fly again, refer to the launch procedure above.